- 首頁
-
產(chǎn)品體系
-
服務(wù)與支持
服務(wù)與支持
- 生態(tài)伙伴
- 投資者關(guān)系
-
知識(shí)產(chǎn)權(quán)保護(hù)
知識(shí)產(chǎn)權(quán)保護(hù)
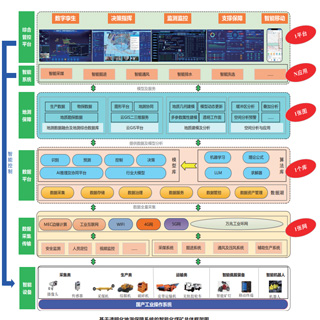
龍軟科技基于精確大地坐標(biāo)及動(dòng)態(tài)地質(zhì)模型的自適應(yīng)采煤技術(shù)包括精細(xì)化物探、透明化地質(zhì)模型構(gòu)建及動(dòng)態(tài)修正、設(shè)備精確坐標(biāo)定位及導(dǎo)航、液壓支架電液控制、視頻AI及矢量拼接、多網(wǎng)融合傳輸及控制、基于透明化地質(zhì)保障的智能開采管控等多項(xiàng)關(guān)鍵技術(shù)和軟、硬件產(chǎn)品。系統(tǒng)架構(gòu)如圖1所示。

智能化自適應(yīng)采煤系統(tǒng)架構(gòu)圖
1、精細(xì)化物探
基于工作面已有鉆孔、測量數(shù)據(jù),結(jié)合采煤工作面地質(zhì)條件,應(yīng)用多種方法聯(lián)合的精細(xì)化物探成果,對(duì)煤層空間分布和頂?shù)装逦恢镁?xì)描述,對(duì)未采區(qū)域內(nèi)各類地質(zhì)異常體、隱伏地質(zhì)災(zāi)害等精細(xì)解釋與圈定,提高煤層頂?shù)装濉⒚汉窈偷刭|(zhì)構(gòu)造的預(yù)測精度,效果如圖2所示。研發(fā)工作面動(dòng)態(tài)地質(zhì)素描裝備,為地質(zhì)模型提供動(dòng)態(tài)修正數(shù)據(jù),保障煤層頂?shù)装褰缑嬲`差不超過20cm。

工作面精細(xì)化物探成果展示
2、透明化地質(zhì)模型構(gòu)建及動(dòng)態(tài)修正
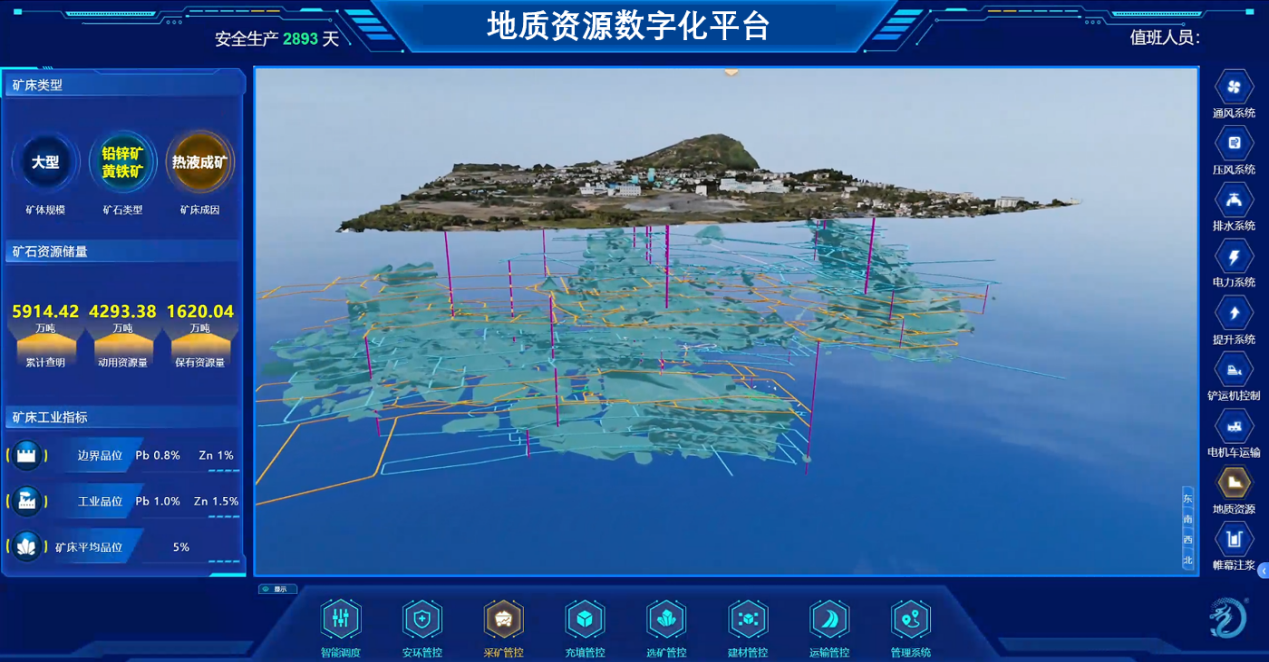
利用云GIS+BIM技術(shù)構(gòu)建透明化工作面高精度三維地測模型、設(shè)備模型和開采環(huán)境,融合精細(xì)化物探成果,基于云GIS平臺(tái)統(tǒng)一坐標(biāo)系實(shí)現(xiàn)井下機(jī)電設(shè)備精細(xì)模型、工作面采掘工程精細(xì)場景模型等各類模型的構(gòu)建;將三維模型與井下設(shè)備監(jiān)測監(jiān)控信息相關(guān)聯(lián),融合設(shè)備位置和姿態(tài)、環(huán)境狀態(tài)等實(shí)時(shí)數(shù)據(jù),實(shí)現(xiàn)數(shù)據(jù)的實(shí)時(shí)共享與更新。云GIS平臺(tái)根據(jù)三維地質(zhì)模型基礎(chǔ)數(shù)據(jù)構(gòu)建初始地質(zhì)模型,基于工作面煤層頂?shù)装褰缇€動(dòng)態(tài)素描系統(tǒng)動(dòng)態(tài)修正地質(zhì)模型,提高工作面地質(zhì)模型精度,如下圖所示。

基于云GIS的透明化地質(zhì)模型構(gòu)建及動(dòng)態(tài)修正
3、設(shè)備精確坐標(biāo)定位和組合導(dǎo)航
基于測量機(jī)器人和慣導(dǎo)的井下測控網(wǎng)絡(luò)如圖4所示,實(shí)現(xiàn)固定控制點(diǎn)的精準(zhǔn)識(shí)別及移動(dòng)目標(biāo)點(diǎn)的自動(dòng)追蹤測量,并定期修正煤機(jī)慣導(dǎo)誤差,提高煤機(jī)導(dǎo)航精度如圖5所示。測控網(wǎng)絡(luò)替代傳統(tǒng)工作面的人工導(dǎo)線測量任務(wù),實(shí)時(shí)全自動(dòng)測量固定和移動(dòng)目標(biāo)點(diǎn)的(x,y,z)三維大地坐標(biāo),為綜采工作面提供刮板調(diào)直、地質(zhì)模型剖切、俯仰采規(guī)劃等精準(zhǔn)位置服務(wù)。

基于測量機(jī)器人和慣導(dǎo)的工作面測控網(wǎng)絡(luò)

基于GIS地圖的導(dǎo)航定位系統(tǒng)
4、液壓支架電液控制
龍軟科技液壓支架電液控制器采用最新嵌入式架構(gòu)設(shè)計(jì)如圖6所示,支持以太網(wǎng)、CAN、RS-485等多種通信方式,可根據(jù)采煤工藝需求靈活、快速配置功能及參數(shù),融合工作面地質(zhì)模型、設(shè)備精確坐標(biāo)定位導(dǎo)航、視頻AI等系統(tǒng)的多模態(tài)數(shù)據(jù),形成邊緣AI控制器,基于高可靠融合通信網(wǎng)絡(luò),實(shí)現(xiàn)對(duì)工作面采煤機(jī)、液壓支架、刮板機(jī)、轉(zhuǎn)載機(jī)、破碎機(jī)、膠帶機(jī)、泵站、開關(guān)等設(shè)備的自適應(yīng)集中控制。

綜采工作面電液控制
5、視頻AI及矢量拼接
綜采工作面視頻AI系統(tǒng)以龍軟時(shí)空大模型為基座,提供工作面視頻數(shù)據(jù)管理、模型訓(xùn)練、模型管理到推理應(yīng)用,如圖7所示。通過視頻AI與工作面時(shí)空地質(zhì)信息的融合分析,實(shí)現(xiàn)刮板脫落、斷鏈、拉斜檢測,刮板機(jī)大塊煤識(shí)別,護(hù)幫板未展/收到位報(bào)警、人員違規(guī)接近滾筒報(bào)警、人員入侵檢測、綜采面堆煤報(bào)警等場景應(yīng)用。
通過對(duì)工作面全景攝像儀的視頻流正射幾何校正與實(shí)時(shí)拼接,構(gòu)建具有三維地理坐標(biāo)屬性的工作面實(shí)時(shí)視頻全景;工作面設(shè)備運(yùn)行過程中,視頻全景融合數(shù)字孿生管控系統(tǒng),能夠及時(shí)觀測工作面片幫和漏頂、滾筒和支架護(hù)幫板之間的位置干涉等異常情況,提高智能開采異常處置能力。

工作面視頻AI
6、多網(wǎng)融合傳輸及控制
基于有線+無線的多網(wǎng)融合傳輸及控制系統(tǒng),實(shí)現(xiàn)工作面有線、無線網(wǎng)絡(luò)全覆蓋。工作面環(huán)網(wǎng)交換機(jī)接入井下工業(yè)環(huán)網(wǎng),通過環(huán)形拓?fù)浜涂焖僮杂鷧f(xié)議實(shí)現(xiàn)冗余路徑和毫秒級(jí)故障恢復(fù)能力,基于該套網(wǎng)絡(luò)實(shí)現(xiàn)液壓電控系統(tǒng)與其他系統(tǒng)的可靠鏈接與通信控制;通過無線網(wǎng)絡(luò)的CPE或模組將綜采工作面移動(dòng)設(shè)備:如采煤機(jī)、慣導(dǎo)、煤巖層識(shí)別裝置、視頻等接入網(wǎng)絡(luò)系統(tǒng)如圖8所示,實(shí)現(xiàn)高速率、低延時(shí)、大帶寬的信息傳輸,解決移動(dòng)裝備線纜難鋪設(shè)、架間電纜易損傷、視頻跟機(jī)畫面卡頓、WiFi和MESH傳輸帶寬低等難題,為智能開采管控平臺(tái)提供良好的網(wǎng)絡(luò)傳輸及控制保障。

工作面融合通信
7、基于透明化地質(zhì)保障的智能開采管控
智能開采管控平臺(tái)包含四部分內(nèi)容,分別是基于透明化地質(zhì)保障的三維數(shù)字孿生管控系統(tǒng)、二維智能開采管控系統(tǒng)、視頻AI及矢量拼接、自適應(yīng)采煤系統(tǒng)。
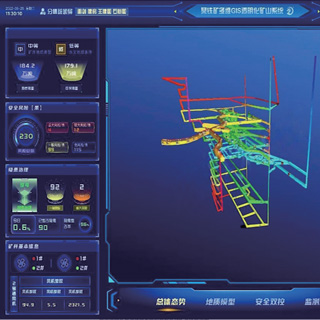
(1)三維數(shù)字孿生管控系統(tǒng)如圖9所示:系統(tǒng)融合工作面槽波、鉆孔雷達(dá)、三維地震數(shù)據(jù)解釋、瞬變電磁、檢修班測量等數(shù)據(jù)動(dòng)態(tài)構(gòu)建高精度三維地質(zhì)模型;利用GIS+BIM技術(shù)構(gòu)建基于統(tǒng)一大地坐標(biāo)的地質(zhì)模型、巷道模型、設(shè)備模型和開采場景;基于各類模型、設(shè)備位姿及運(yùn)行參數(shù),實(shí)現(xiàn)工作面的數(shù)字孿生一體化管控。

三維數(shù)字孿生管控系統(tǒng)
(2)二維智能開采管控系統(tǒng)如圖10所示:包括綜采工作面自適應(yīng)集控、電液控制器管理、慣導(dǎo)精確定位與組合導(dǎo)航、刮板機(jī)自動(dòng)調(diào)直、測量機(jī)器人動(dòng)態(tài)標(biāo)定、地質(zhì)模型剖切和動(dòng)態(tài)修正、數(shù)據(jù)管理與分析、刀號(hào)生成等功能,實(shí)現(xiàn)基于龍軟GIS地圖的工作面一鍵啟停自適應(yīng)控制。

二維智能開采管控系統(tǒng)
(3)視頻AI及矢量拼接系統(tǒng)如圖11所示:采煤機(jī)運(yùn)行過程中,系統(tǒng)自動(dòng)切換攝像儀和調(diào)整攝像儀預(yù)置位,實(shí)時(shí)校正和拼接全景攝像儀的視頻流,構(gòu)建具有三維地理坐標(biāo)屬性的實(shí)時(shí)視頻全景,聯(lián)合數(shù)字孿生管控系統(tǒng)使用,能夠及時(shí)觀測工作面片幫和漏頂、滾筒和支架護(hù)幫板之間的位置干涉等異常情況,提高工作面開采過程中異常情況的處置能力。

工作面視頻流矢量拼接
(4)自適應(yīng)采煤系統(tǒng)如圖12所示:包括自適應(yīng)截割數(shù)據(jù)預(yù)覽和下發(fā)、自適應(yīng)開采仿真等功能。系統(tǒng)展示了工作面地質(zhì)模型剖面煤巖層位信息、人員和采煤機(jī)位置信息、人員與支架位置閉鎖、液壓支架運(yùn)行參數(shù)等;集控人員下發(fā)自適應(yīng)截割數(shù)據(jù)前,可提前預(yù)覽和調(diào)整左右滾筒預(yù)設(shè)截割線,采煤機(jī)自適應(yīng)截割過程中展示實(shí)際截割線、相對(duì)偏差及人工干預(yù)狀態(tài)等信息。

自適應(yīng)采煤系統(tǒng)
龍軟科技基于精確大地坐標(biāo)及動(dòng)態(tài)地質(zhì)模型的自適應(yīng)采煤技術(shù)是建設(shè)中級(jí)、高級(jí)智能化采煤工作面的必備,系統(tǒng)設(shè)置地面智能化采礦員操作崗,如圖13所示,采礦員西裝革履負(fù)責(zé)平臺(tái)的常態(tài)化運(yùn)行操作;自適應(yīng)采煤系統(tǒng)減少工作面人員至2-3人,降低了采煤作業(yè)人員的勞動(dòng)強(qiáng)度,提高采煤過程中的安全性和智能化水平,為煤礦智能開采提供了有效的技術(shù)保障。

龍軟自適應(yīng)采煤應(yīng)用現(xiàn)場

CopyRight©北京龍軟科技股份有限公司 版權(quán)所有 京ICP備05015939號(hào) 京公網(wǎng)安備 11010802011445號(hào)





 返回列表
返回列表