全部 基礎平臺 新聞資訊 產品體系
智能管控
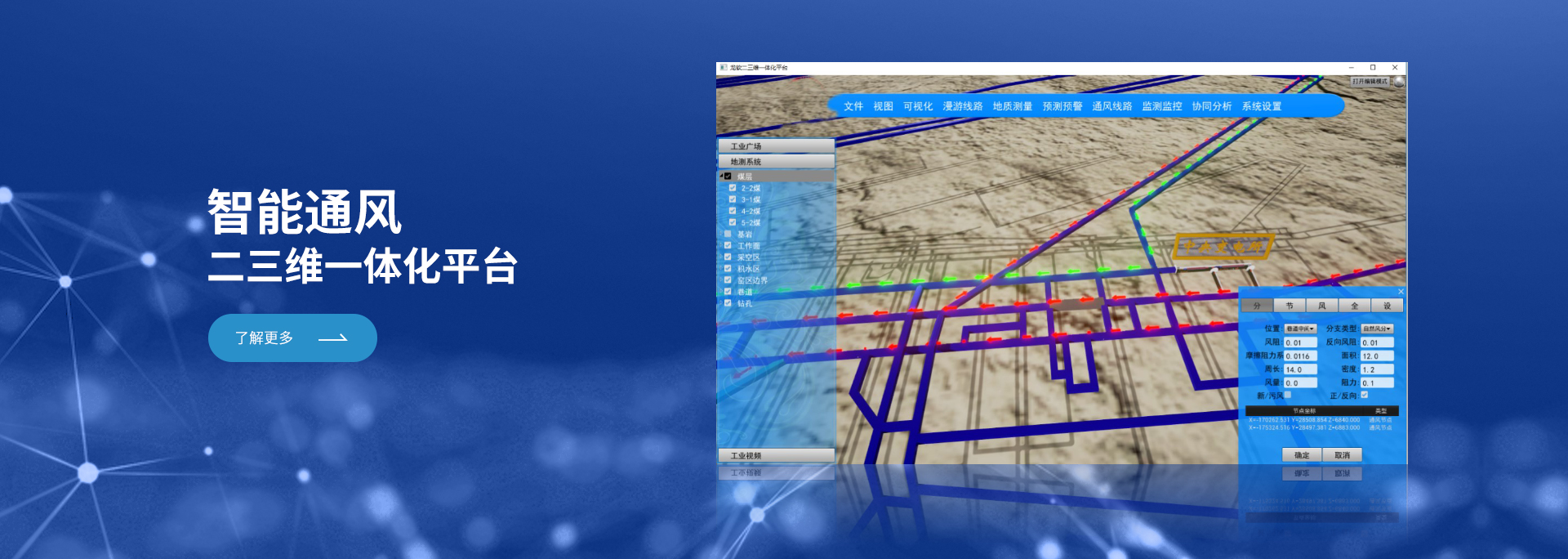
智能采掘和通風
互聯網+礦山監管
教育培訓
智慧城市
硬件產品
智慧煤炭云服務
三維透明地質云服務
智能化礦山整體解決方案
智能開采
安全生產信息管理整體解決方案
省(市、縣)級安全監管平臺整體解決方案
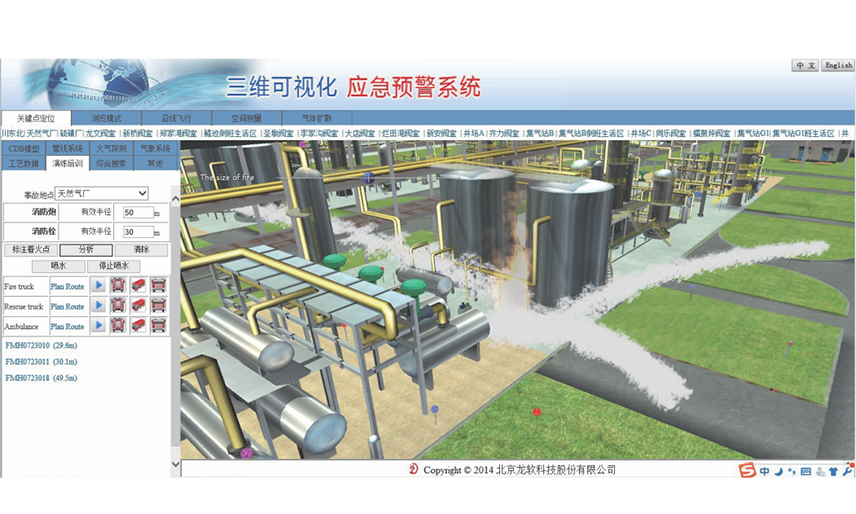
危化企業應急管理解決方案
礦井重大危險源監測、預警與決策支持系統整體解決方案
智慧園區安全環保監管解決方案
CopyRight©北京龍軟科技股份有限公司 版權所有 京ICP備05015939號 京公網安備 11010802011445號
聯系地址:北京市海淀區中關村彩和坊路8號天創科技大廈1008室 電話:400-083-7818/62670052


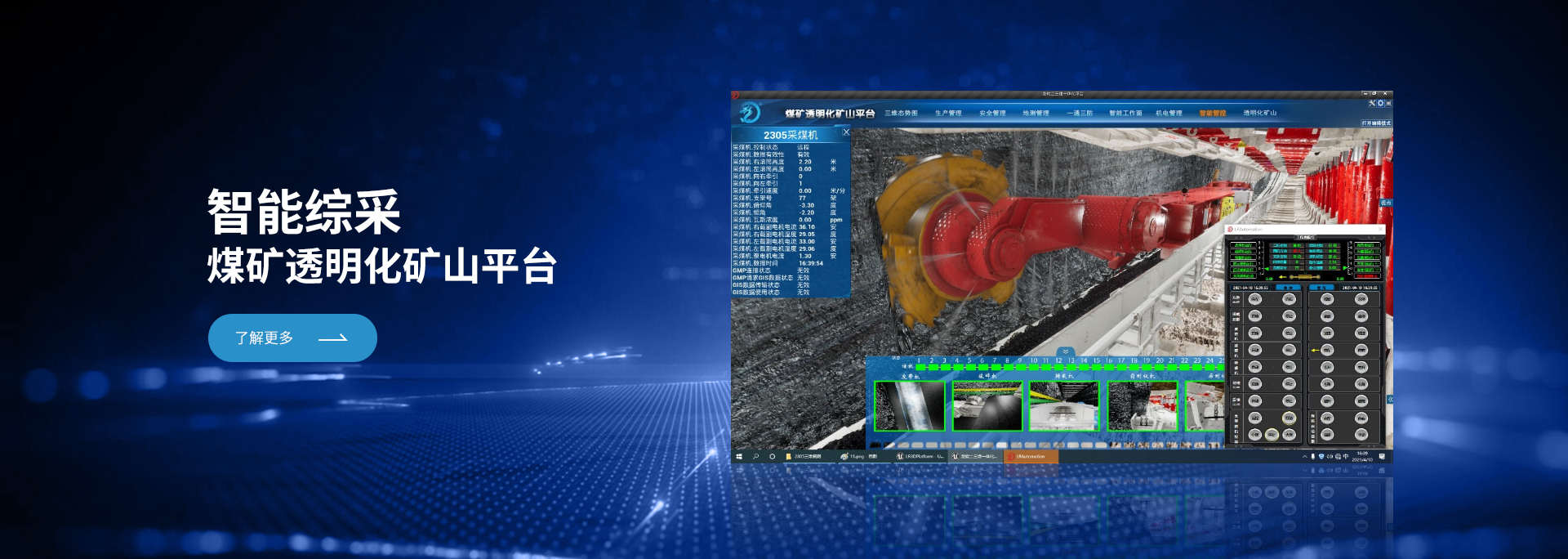












 了解更多
了解更多





